
全国咨询热线
全国咨询热线

BMS电池管理系统一般由检测功能单元与运算控制单元构成,如同智能产品一样,根据大量检测信号来协调整个系统的科学运行。
BMS中所指的检测一般会包括电池组的电压、电流和工作温度信息的采集,然后将数据传送给运算模块,运算模块将根据算法来处理这些数据,并给出下一步的策略和指令。那么BMS的运算模块就像是人的大脑一样重要,如同电脑的CPU一样,是整个系统的部分。运算模块通常包含运算芯片硬件、基础软件、运行环境(RTE)以及管理软件。管理软件则是各大BMS厂家的技术,因为的算法即能保证系统的管理效率,又能将电池的性能发挥到。
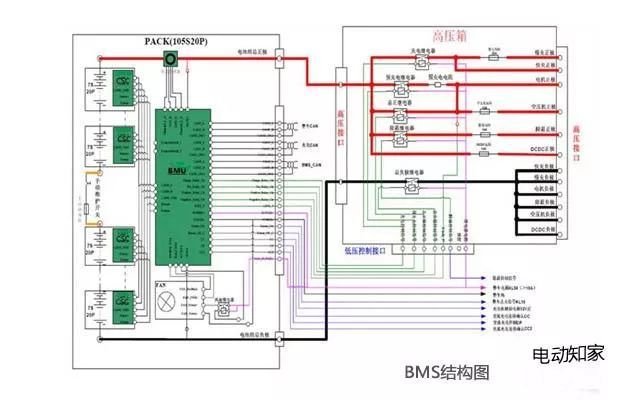
图1 BMS结构图
BMS的功能一般包括:电池状态的估算算法和故障诊断以及保护。状态估算包括SOC(State Of Charge)、SOP(State Of Power)、SOH(State of Health)以及均衡和热管理。
SOC(State Of Charge)电池荷电状态
SOC (荷电状态)简单的说就是电池还剩下多少电;SOC 是BMS中重要的参数,因为其他一切都是以SOC为基础的,所以它的精度和健壮性极其重要。如果没有的SOC,加再多的保护功能也无法使BMS正常工作,因为电池会经常处于被保护状态,更无法延长电池的寿命。SOC的估算精度也是十分重要的。精度越高,对于相同容量的电池,可以有更高的续航里程。所以,高精度的SOC估算可以有效地降低所需要的电池成本。
下图是一个算法健壮性的例子。锂电芯采用的是磷酸铁锂电池。它的SOCvs OCV曲线在SOC从70%到95%区间大约只变化2-3mV。而电压传感器的测量误差就有3-4mV。在这种情况下,我们有意让初始SOC有20%的误差,看看算法能不能够把这20%的误差纠正过来。如果没有纠错功能,SOC会按照SOCI的曲线走。算法输出的SOC是CombinedSOC也即是图中的蓝色实线。CalculatedSOC是根据的验证结果反推回去的真正SOC。
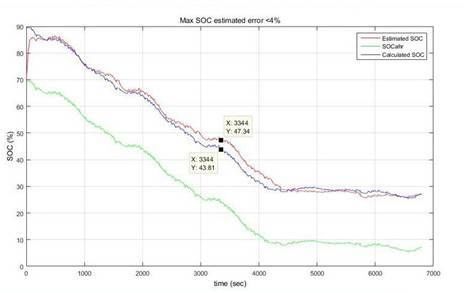
图2 BMS电池管理系统实时纠错修复
如上图中:磷酸铁锂电池算法强大的纠错能力:估算出的SOC(红色),安时积分法SOC(绿色),真正的SOC(蓝色)之间的曲线对比。即使是在电压极难测准的SOC 70%~90%区间(在此SOC区间开路电压仅仅变化2~3mV),开始SOC数据中20%的误差,本算法也能将其纠正在SOC为40~50%的区间,开路电压仅仅变化1mV,此时SOC估算误差小于4%,可见算法非常地。
SOP(State Of Power) 电池能源状态
SOP是下一时刻比如下一个2秒、10秒、30秒以及持续的大电流的时候电池能够提供的的放电和被充电的功率。当然,这里面还应该考虑到持续的大电流对保险丝的影响。
SOP的估算可以限度地提高电池的利用效率。比如在刹车时可以尽量多的吸收回馈的能量而不伤害电池。在加速时可以提供更大的功率获得更大的加速度而不伤害电池。同时也可以保证车在行驶过程中不会因为欠压或者过流保护而失去动力即使是在SOC很低的时候。这么一来,所谓的保护二级保护在的SOP面前都是过眼云烟。不是说保护不重要。保护永远都是需要的。但是它不可能是BMS的技术。对于低温、旧电池以及很低的SOC来说,的SOP估算尤其重要。例如对于一组均衡很好的电池包,在比较高的SOC时,彼此间SOC可能相差很小,比如1-2%。但当SOC很低时,会出现某个电芯电压急速下降的情况。这个电芯的电压甚至比其他电池电压低1V多的情况。要保证每一个电芯电压始终不低于电池供应商给出的电压,SOP必须地估算出下一时刻这个电压急速下降的电芯的的输出功率以限制电池的使用从而保护电池。估算SOP的是实时在线估算电池的每一个等效阻抗。
SOH(State of Health) 电池健康状态
SOH 是指电池的健康状态。它包括两部分:安时容量和功率的变化。一般认为:当安时容量衰减20%或者输出功率衰减25%时,电池的寿命就到了。但是,这并不是说车就不能开了。对于纯电动车EV来说安时容量的估算更重要一些因为它与续航里程有直接关系而功率限制只是在低SOC的时候才重要。对于HEV或者PHEV来说,功率的变化更为重要这是因为电池的安时容量比较小,可以提供的功率有限尤其是在低温。对于SOH的要求也是既要高精度也要健壮性。而且没有健壮性的SOH是没有意义的。精度低于20%,就没有意义。SOH的估算也是基于SOC的估算。所以SOC的算法是算法的。电池状态估算算法是BMS的。其他的都是为这个算法服务的。
目前国内很多BMS厂商仍然在使用电流积分加开路电压的方法用开路电压计算初始SOC,然后用电流积分计算SOC的变化。这样如果启始点的电压错了,或者安时容量不准,岂不是要一错到底直到再次充满才能纠正?启始点的电压错会出错吗?经验告诉我们,会的,尽管概率很低。如果要保证万无一失,就不能只靠的启始点的电压来保证启始SOC的正确。
关于电池均衡
近国内关于”主动均衡“技术非常关注,我们知道均衡的意义在于让所有的电池,保持一样的容量、电压状态。主动均衡的算法无外乎是同模组到电池相互均衡和不同模组之间的电池相互均衡,通用汽车公司早在6-7年前就已经完成了仿真验证,那国外厂商为什么基本上不用主动均衡呢?主要是考虑到成本问题。其实如果被动均衡就能够搞定,主动均衡的成本效益意义就不大啦。
有人说被动均衡浪费了很多电。所以不好。以96节串联的电池组为例,我们可以算出在差情况下,被动均衡到底浪费了多少电。如果均衡电流是0.1A,一节电池在被均衡时大约要浪费0.4W。差的情况是有95节电池都需要放电,所以,差情况是有0.4X95=38W。还不如汽车的一个大灯(大约45瓦)费电。如果不是差的情况,也许只要十几瓦甚至几瓦就够了。所以,尽管被动均衡浪费了一点电,但是它如果能够极大地延长电池的寿命,何乐不为呢?还有人说,对于比较大的安时容量的电池来说0.1A电流太小。如果能够把不均衡消灭在萌芽状态,就不会有无能为力情况的出现。如果电芯本身已经不能正常工作了,无论是主动均衡还是被动均衡都是无能为力的。所以,不能完全责怪电池的一致性不好。也需要从自身找原因。
笔者曾经做过的车里有两款PHEV的车,开了才几个月电池组内的SOC相差高达45%。而且由于SOC、SOP的问题,车在路上经常抛锚。公司一致认为是电池质量问题而且一致同意更换电池供应商。但是我仅仅只是更改了算法,就把均衡的问题解决了。而且是在公司明确规定不许充电的情况下做的。因为已经有一辆车由于电池问题出了事故。电池组中电芯SOC的差别由45%降到了3%。现在车已经行驶了十几万公里了。抛锚的问题再也没有发生过。
图3 动态均衡减小SOC差从45%到3%
目前国外大公司都在用在线实时估算开路电压来实现在线实时纠错。为什么在这里要强调实时在线估算?它的好处在哪里?通过实时在线估算估算出电池的所有等效参数,从而地估算出电池组的状态。实时在线估算极大的简化了电池的标定工作。使得对一致性不太好电池组状态的控制成为现实。实时在线估算使得无论是新电池还是老化后的电池,都能保持高精度(Accuracy)和超强的纠错能力(Robustness or error correction capability)。
目前世界上BMS做得的应该有什么特点呢?它可以在线实时估算电池组的电池参数从而估算出电池组的SOC、SOP、SOH,并且能够在短时间内纠正初始SOC超过10%的误差以及超过20%的安时容量的误差或者百分之几的电流测量误差。美国通用汽车公司在6年前研发沃蓝达时就做过一个实验来测试算法的健壮性:将3串并联在一起的电池组拿掉一串,这时内阻增加1/3、安时容量减小1/3。但是BMS并不知道。结果是SOC、SOP 在不到1分钟就全部纠正SOH随后也被地估算出来。这不仅说明算法的强大的纠错能力,而且说明算法可以在电池的整个生命周期中始终保持估算精度不变。
汽车电子需要保证在任何情况下都能工作。做一个好的算法需要化极大精力去解决那些发生概率只有千分之一、万分之一的情况。只有这样才能保证万无一失。比如说当车高速行驶在盘山公路上,大家所知道电池模型都会失效。这是因为持续的大电流会很快消耗掉电极表面的带电离子,而内部的离子来不及扩散出来,电池电压会急剧下降。估算出SOC会有较大的误差甚至会有10% 以上的误差。的数学模型就是数学物理方法教科书上讲的扩散方程。但是它无法用在车上因为数值解的运算量太大。BMS的CPU运算能力不够。这不仅是一个工程难题,也是一个数学和物理的难题。解决这样的技术难题,可以化解已知的几乎所有影响电池状态估算的极化问题。
东莞市嘉纳电子科技有限公司
微信二维码
微信号:55886868Copyright © 2018-2020 PbootCMS All Rights Reserved. 粤ICP备18049383号
XML地图